Create new vehicle
To create the catkin package and file structure necessary to create a new underwater vehicle, you can run the following script in your catkin workspace
rosrun uuv_assistants create_new_robot_model --robot_name <ROBOT_NAME>
This will create a catkin package named <ROBOT_NAME>_description with templates for launch and URDF files. The snippets to use the UUV simulator's plugins are included and should be modified in order to be used. The template files do NOT describe any vehicle in particular. Meshes should also be included by the user in the meshes folder. The complete folder structure can be seen below.
<ROBOT_NAME>_description |-- launch |-- upload.launch |-- meshes |-- README.md |-- robots |-- default.xacro |-- urdf |-- actuators.xacro |-- base.xacro |-- gazebo.xacro |-- sensors.xacro |-- snippets.xacro `-- CMakeLists.txt `-- package.xml
Actuators and vehicles are modeled separately in the robot description and should also have separate mesh files. The thruster plugin macros set the axis of rotation of the thruster as the X axis, so it is better to setup the mesh accordingly, like in the example below showing the mesh for the RexROV thruster.
Note
Check the page on how to configuration the thruster manager to see how to setup the thruster allocation matrix and configure the thruster manager node for the vehicle.
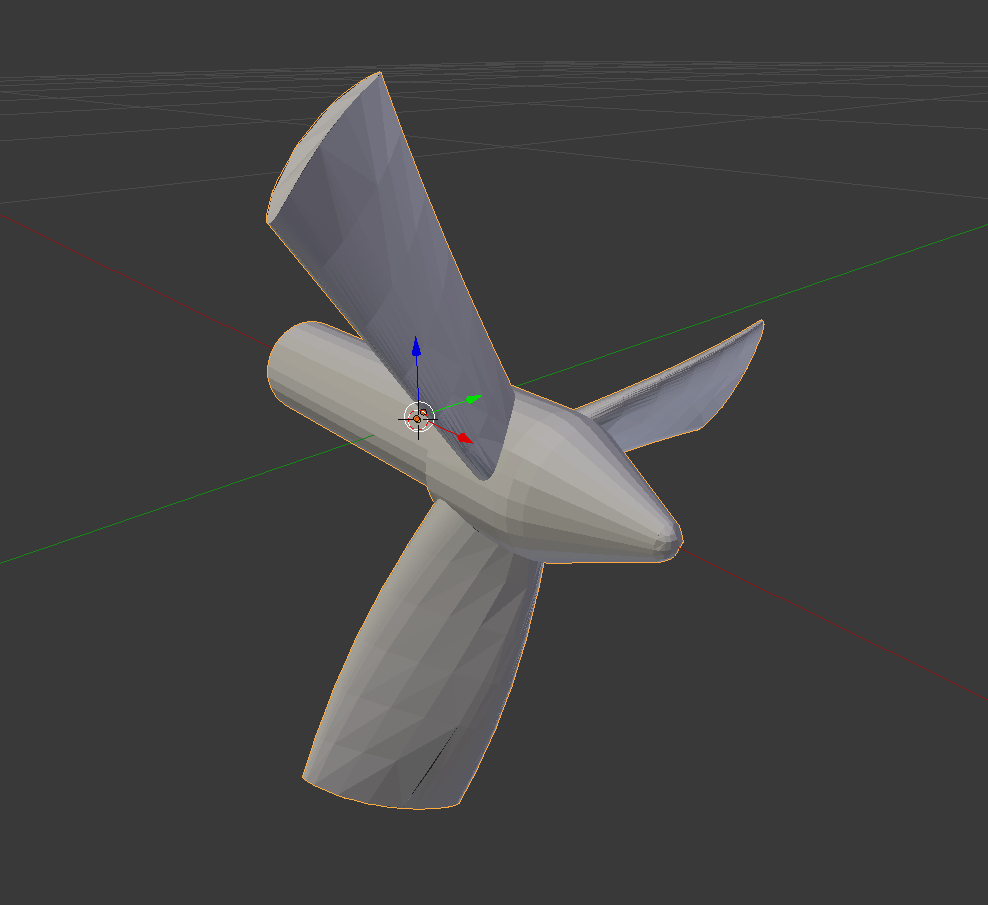
The fin plugin macros available in set the fin joint to rotate around the Z axis, so the fin mesh can be positioned as in the image below to avoid configuring its origin and orientation in the URDF file.
.. image:: ../images/tutorial_new_vehicle/fin_mesh.png
The template files should have the necessary macros for ROVs, AUVs and simple
surface vessels. If you want to check more macros of URDF snippets for UUV
simulator plugins, you should check the uuv_gazebo_ros_plugins XACRO macros <https://github.com/uuvsimulator/uuv_simulator/tree/master/uuv_gazebo_plugins/uuv_gazebo_ros_plugins/urdf>_
and the uuv_sensor_plugins_ros XACRO macros <https://github.com/uuvsimulator/uuv_simulator/tree/master/uuv_sensor_plugins/uuv_sensor_plugins_ros/urdf>_.
.. note::
The position and orientation for sensors, actuators and center of buoyancy
must be set with respect to the center of gravity of the vehicle's base link.
ROS and Gazebo also use per default the ENU (East-North-Up) reference frame <http://www.ros.org/reps/rep-0103.html>_
convention, not NED (North-East-Down).