FAQ
How do I find out the ID number my joystick?¶
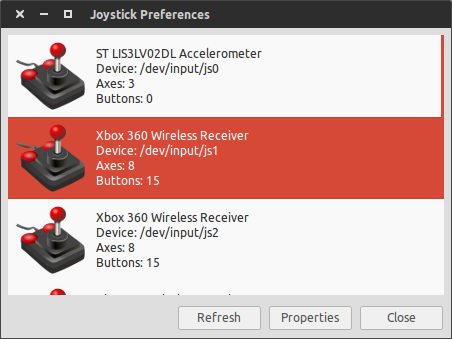
You can use jstest-gtk to find that out. To install it, run
sudo apt-get install jstest-gtk
and run it on the terminal. It will open a window as seen below. The joystick
devices are named /dev/input/js1 for the device #1. You can use this index
for the launch files that have the input option joy_id.
My machine doesn't seem to see the services and topics from the roscore running remotely¶
If you are having trouble running your application in multiple computers, you
can try adding the hostnames and IP addresses of your machines to the
/etc/hosts file of the computer running roscore.
After running catkin build, I still can't start any nodes or launch files¶
If after compiling your catkin workspace using catkin build ROS seems to not
update the paths to the packages even after you run
cd ~/catkin_ws source devel/setup.bash
you can try disabling the option to source the install folder of your catkin
workspace by running
cd ~/catkin_ws
catkin config --no-install
catkin clean --all
Then rebuild your workspace
cd ~/catkin_ws catkin build source devel/setup.bash
The Gazebo worlds don't start when running the simulation on a virtual machine¶
To avoid segmentation faults when starting Gazebo in a virtual machine you can
add the following line to your ~/.bashrc file
export LIBGL_ALWAYS_SOFTWARE=1
Info
If you are running VirtualBox, remember to install the guest additions to your virtual machine as well.
Warning
It is strongly recommended to have your machine running with Linux natively to run the simulation since the performance on virtual machines can be very poor.